Читайте также:
|
Бұл заң бойынша, бір бірінен r қашықтықта тұрған m1 жəне m2 нүктелік массалар арасындағы тартылыс күші F мынадай түрде анықталады:
 мұндағы G=6.7*
мұндағы G=6.7*  гравитация тұрақтысы.
гравитация тұрақтысы.
Жер бетіне таяу өріс. Жер радиусын Ro арқылы, ал оның жоғарғы бетінен массасы m материялы нүктеге дейінгі қашықтықты h деп белгілейік, сонымен қатар, h<<Ro. Онда ауырлық күші былайша анықталады:
F=  мұнда М – Жердің массасы.
мұнда М – Жердің массасы.
Ауырлық күшін белгілі дəлдікпен биіктікке тəуелсіз тұрақты шама деп есептеуге болады, ендеше

мұнда g=  – Жер бетіне таяу жердегі еркін түсудің үдеуі.
– Жер бетіне таяу жердегі еркін түсудің үдеуі.
Салмақ. Дененің ілгішке немесе тірекке əсер ету күшін дененің салмағы деп атаймыз жəне оны Р əрпімен белгілейік. Егерде дене мен тірек (ілгіш) жерге салыстырғанда тыныштықта тұратын болса, онда салмақ mg -ға тең,

Егерде олардың қозғалысы қандайда бір а үдеумен жүретін болса, онда P ≠ mg. Бұл жағдайда дененің салмағы келесі өрнекпен анықталады:
F=m(g-a)
Осы өрнекті қозғалыс бағытына проекцияласақ келесі формуланы аламыз
F = m (g ± a) бұл жерде «+» а жоғары бағытталғанда, «-» а төмен бағытталғанда.
Серпімділік күші. Гук заңы. Кез келген нақты дене оған түсірілген күштің əсерінен деформацияланады, яғни, өзінің көлемі мен формасын өзгертеді. Егер күш əсері тоқтатылғаннан соң дене өзінің бастапқы көлемі мен формасына қайтып оралса, деформация серпімді деп аталады.
Тəжірибе көрсететіндей, кішігірім деформация кезінде Δ l серіппесінің ұзаруы созушы күшке пропорционал боп шығады: Δ l ∼ F. Тиісінше, серпімді күш серіппенің ұзаруына пропорционал болады: F = k Δ l
Пропорционалдық коэффициент k серіппенің қатаңдық коэффициенті деп аталады.
Серпімділік күші мен деформация арасындағы пропорционалдық туралы ұйғарым Гук заңы деген атауға ие.
Тұтқыр үйкеліс (Трение вязкое) — үйкелісетін денелер арасы тұтқыр ортамен толғанда пайда болатын үйкеліс.
Құрғақ үйкелісі (Трение сухое) — 1) үйкелістегі денелердің үйкелу беттері қатты қабық болып келгендегі сырғанау үйкелісі; 2) үйкелісетін денелер беттерінде тотықтар және ластанулар бар, бірақ жасанды май жоқ үйкеліс.
Сырғанау үйкелісі (Трение скольжения) — 1) қарастырылып отырған дененің бір нүктесі екінші дененің барлық нүктелерімен біртіндеп жанасатын кинематикалық үйкеліс; 2) бір дененің бетінің барлық нүктесі басқа дене бетінің жанама бойымен қозғалуымен сипатталатын үйкеліс.
Сырғанау үйкеліс күші - тіреу беті реакциясының жанама құраушысы беттерінің жанасу нүктелерімен сырғанау мүмкіндігіне қарсы бағытталған шама.
Тыныштық үйкеліс күші - толық емес үйкелістің максималь күші.
7. Материялық нүктелер жүйесі деп олардың соңғы сандарының жиынтығын айтады. Жүйенің бұл нүктелерінің əрқайсысына шығу тегі екі түрлі күштер əсер етеді: біріншіден, бастау көзі жүйеден сырт жатқан күштер, олар сыртқы күштер деп аталады; екіншіден, ішкі күштер деп
аталатын, жүйенің басқа нүктелері жағынан түсірілетін күштер. О нүктесіне қарасты (6 сурет) материялық нүктеге əсер етуші күш моменті мына вектор болып табылады M = r × F.
F деп материялық нүктеге əсер етуші барлық күштердің тең əсерлісін айтады. Бастапқы деп қабылданып алынған қайсыбір материялық нүктенің О нүктесіне қарасты орналасу жағдайы r радиус-векторымен сипатталады.
О нүктесіне қарасты материялық нүктенің импульс моменті мына вектор
L = r × P.
Уақыт бойынша (42) импульс моменті өрнегін дифференциалдау арқылы моменттер теңдеуін аламыз: 
8. Материялық нүктелер жүйесі деп олардың соңғы сандарының жиынтығын айтады. Жүйенің бұл нүктелерінің əрқайсысына шығу тегі екі түрлі күштер əсер етеді: біріншіден, бастау көзі жүйеден сырт жатқан күштер, олар сыртқы күштер деп аталады; екіншіден, ішкі күштер деп аталатын, жүйенің басқа нүктелері жағынан түсірілетін күштер.
Материялық нүктелер жүйесіне əсер етуші күш жүйе нүктелерінің өзара əсерлесу күштерін қоса алғанда, жүйенің нүктелеріне əсер етуші барлық күштердің қосындысы ретінде анықталады:

 =
= 
жүйенің i индексімен белгіленген материялық нүктесіне əсер етуші күш
болып табылады. Ол осы нүктеге əсер етуші  сыртқы күштен, жəне
сыртқы күштен, жəне
жүйенің басқа нүктелерімен əсерлесу нəтижесінде нүктеге əсер етуші 
ішкі күштен құралады.
Ньютонның үшінші заңы материялық нүктелер жүйесіне əсер етуші күш
үшін (46) ұйғарымын қарапайым түрге енгізуге көмектеседі:
 =
= 
яғни, материялық нүктелер жүйесіне əсер етуші күш, жүйе нүктелеріне əсер етуші сыртқы күштердің қосындысына тең. Сондықтан, (46)-да -деп тек сыртқы күштерді түсінуге болады.
О нүктесіне қарасты материялық нүктелер жүйесіне əсер етуші күш моменті деп, О нүктесіне қарасты жүйе нүктелеріне түсірілген күшмоменттерінің қосындысын айтады:
M= 
(49)-ғы  күші i нүктесіне түсірілген ішкі күштерді қоса алғандағы толық күш болып табылады:
күші i нүктесіне түсірілген ішкі күштерді қоса алғандағы толық күш болып табылады:

мұнда– сыртқы күш, ал  – ішкі күштер.
– ішкі күштер.
Массалар центрі. Бейрелятивистік жағдайда, яғни, аз жылдамдықты қозғалыстар кезінде, массалар центрі ұғымын енгізуге болады. Ең алдымен, нүктелер жүйесінің импульсі үшін ұйғарымдарды қарастырайық:
P= 
мұнда m=  өзін құраушы нүктелердің тыныштық массасының қосындысы ретінде түсінілетін жүйе массасы.
өзін құраушы нүктелердің тыныштық массасының қосындысы ретінде түсінілетін жүйе массасы.
Радиус-вектор 
жүйе массаларының центрі деп аталатын жорамал нүктені анықтайды.
 шамасы – осы жорамал нүктенің қозғалыс жылдамдығы. Ендеше
шамасы – осы жорамал нүктенің қозғалыс жылдамдығы. Ендеше
P=m 
Осы ұйғарымдарды ескерсек, қозғалыс теңдеуі мынадай түрге енеді: m
яғни, ол бүкіл массасы массалар центрінде шоғырланған, ал жүйенің нүктелеріне əсер етуші барлық сыртқы күштер оның массалар центріне түсірілген материялық нүкте қозғалысының теңдеуіне эквивалентті.
9. Қисық сызықты қозғалыс кезінде  үдеу векторының бағыты
үдеу векторының бағыты  жылдамдық векторының бағытымен сәйкес келмейді. үдеу векторының құраушыларын жанама (тангенциал)
жылдамдық векторының бағытымен сәйкес келмейді. үдеу векторының құраушыларын жанама (тангенциал)  және нормаль
және нормаль  үдеу деп атайды (сурет 1.1.5).
үдеу деп атайды (сурет 1.1.5).

Сурет 1.1.5. Жанама және нормаль үдеулер.
Жанама үдеу дененің жылдамдығы модуль жағынан қалай өзгеретінін көрсетеді:

векторы траекторияға жанама бойымен бағытталады.
Нормаль үдеу дененің жылдамдығы бағыты жағынан қалай өзгеретінін көрсетеді. Қисық сызықты қозғалысты шеңберлер доғаларының бойымен қозғалыс түрінде көрсетуге болады (сурет 1.1.6).
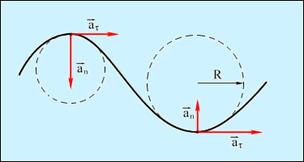
Сурет 1.1.6 Шеңберлер доғаларының бойымен қозғалыс.
Нормаль үдеу v жылдамдықтың модулінен және дене осы уақытта қозғалған шеңбердің R радиусынан тәуелді.

векторы әрқашан шеңбердің центріне бағытталады.
1.1.5. суретінен толық үдеудің модулі

шамасына тең болатыны көрініп тұр.
Сонымен, кинематикада материалдық нүктенің негізгі физикалық шамаларының қатарына: l жүрген жолы, Δs орын ауыстыруы, жылдамдық және үдеу жатады. l жолы – скаляр шама болып табылады. Δs орын ауыстыруы, жылдамдығы және үдеу – векторлық шамаларға жатады. Векторлық шаманы көрсету үшін, оның модулін және бағытын көрсету қажет. Векторлық шамалар белгілі математикалық ережелерге бағынады. Векторларды координат осьтеріне проекциялауға, оларды қосуға, алуға, т.с.с. болады.
10.1) Жазық қозғалыс - қатты дененің барлық нүктелері кейбір қозғалмайтын жазықтыққа параллель қозғалған кездегі қозғалыс.
 қатты дене қозғалмайтын кезде.
қатты дене қозғалмайтын кезде.
Ілгерлемелі қозғалыс теңдеуі: 

2) Цилиндрдің көлбеу бетпен домалауы.
Цилиндр домалаған кезде ось ілгерлемелі қозғалады, бағыты қзгермейді.



Дата добавления: 2014-11-24; просмотров: 523 | Поможем написать вашу работу | Нарушение авторских прав |