Читайте также:
|
Основные кинематические характеристики вращательного движения тела — его угловая скорость ( ) и угловое ускорение. Основные динамические характеристики вращательного движения — момент импульса относительно оси вращения z.
) и угловое ускорение. Основные динамические характеристики вращательного движения — момент импульса относительно оси вращения z.
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис. 1). Ее положение через промежуток времени Δt зададим углом Δφ. Элементарные (бесконечно малые) повороты можно рассматривать как векторы (они обозначаются Δ φ или d φ). Модуль вектора d φ равен углу поворота, а его направление совпадает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т. е. подчиняется правилу правого винта (рис. 1). Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения: они могут откладываться из любой точки оси вращения.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
 (11)
(11)
Вектор ω направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор dφ (рис. 3). Размерность угловой скорости dim ω = Т-1, а ее единица—радиан в секунду (рад/с).
Линейная скорость точки (рис. 2)

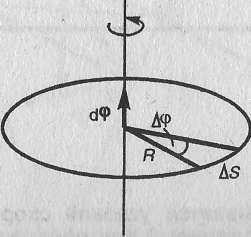
Рис.2
т.е v=ωR (12)
В векторном виде формулу для линейной скорости можно написать как векторное произведение: 
При этом модуль векторного произведения, по определению, равен ωRsin(ω, R), а направление совпадает с направлением поступательного движения правого винта его вращения от ω к R.

Рис.3
Если ω=const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt=Т соответствует Δφ=2π, то ω=2π/T, откуда Т = 2π/ω.(13)
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n= 1/T = ω/(2π), откуда ω = 2πn.(14)
Угловым ускорением называется векторная величина, равная первой производной yгловой скорости по времени:  (15)
(15)

Рис.4
При вращении тела вокруг неподвижной оси вектор углового ускорения ε направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор ε сонаправлен вектору ω (рис. 3), при замедленном - противонаправлен ему (рис. 5).
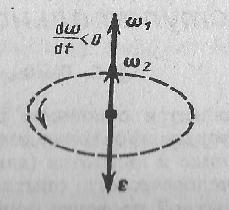
Рис.5
Тангенциальная составляющая ускорения aτ=dv/dt, v = ωR и

 (15)
(15)
Нормальная составляющая ускорения
 (16)
(16)
Значит, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение аτ, нормальное ускорение аn) и угловыми величинами (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:
s = Rφ, v = Rω, аτ = R, an = ω2R
В случае равнопеременного движения точки по окружности (ω=const)
ω = ω0 ± ∆t, φ = ω0t ± ∆t2/2, где ω0 — начальная угловая скорость.
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Момент импульса Lz не зависит от положения точки О на оси z.
При вращении абсолютно твердого тела вокруг неподвижной оси z каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой скоростью v i. Скорость v i и импульс mi v i перпендикулярны этому радиусу, т. с. радиус является плечом вектора mi v i. Поэтому можем записать, что момент импульса отдельной частицы равен
 (17)
(17)
и направлен по оси в сторону, определяемую правилом правого винта.
Монет импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:
 (18)
(18)
Используя формулу (19) vi = wri, получим 
 (20)
(20)
Таки м образом, момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. Продифференцируем уравнение (20) по времени: 
 (21)
(21)
Это выражение — еще одна форма уравнения динамики вращательного движения твердого тела относительно неподвижной оси: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси.
Дата добавления: 2015-09-10; просмотров: 577 | Поможем написать вашу работу | Нарушение авторских прав |
| <== предыдущая лекция | | | следующая лекция ==> |
| Нахождение координаты по известной зависимости скорости от времени. | | | Момент инерции. |